HASSP Testing Diary #2
Welcome back to the HASSP testing diary. We’ve been hard at work since my last update constructing the final capsule that will take our payload up in the air, as well as making some last minute adjustments. Here’s what we’ve been working on.
Watching the skies
With our launch date fast approaching, we’ve shifted a lot of attention to our launch site. Three launch sites, actually. We have a primary and two backup locations, mostly because the flight profile our balloon can change by the hour. If we see a flight predictor showing us that our payload might cross a no-fly zone or potentially land some place it shouldn’t, we’ll be able to shift to a secondary location. A lot of predictors we’re using can spit out Google Earth KML files to show our flight paths and way points. It’s pretty cool looking:

Cleared for take off
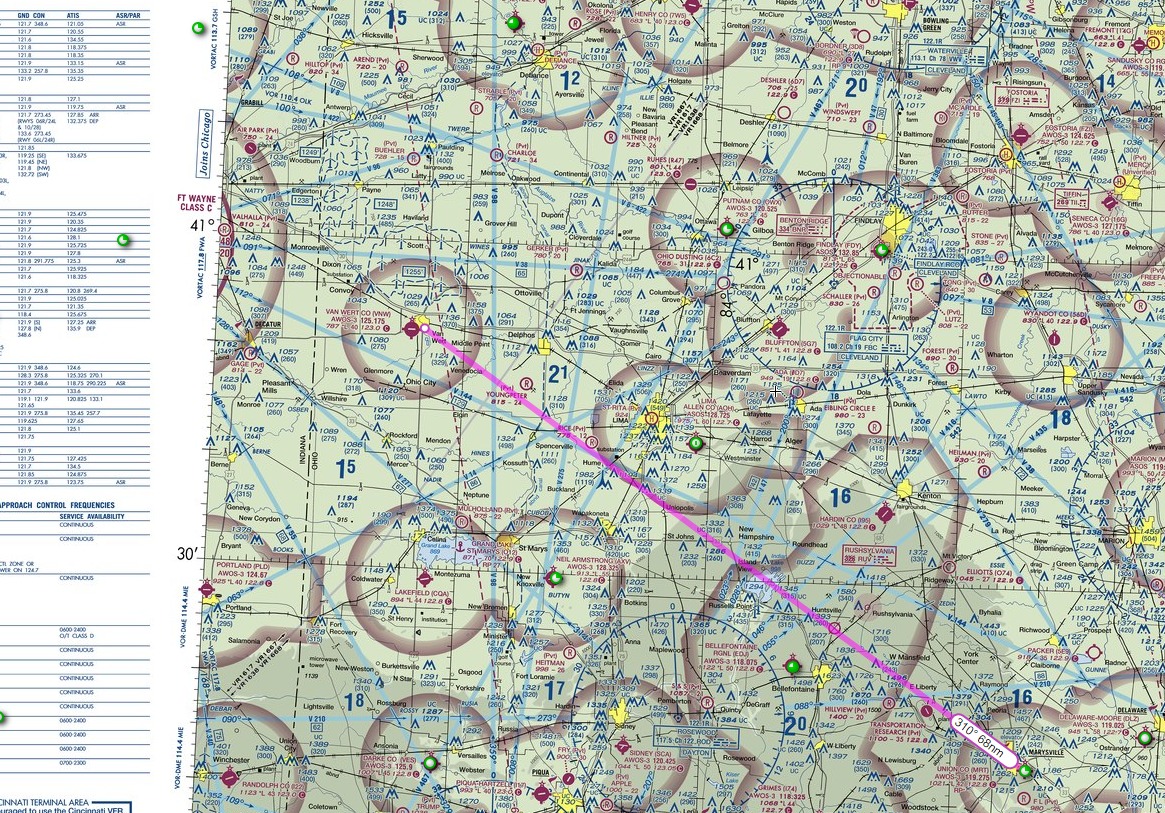
Shortly before launch, we’ll need to make sure we contact all our local FAA entities and let them know what we’re up to. This includes a Notice to Airmen (NOTAM) and contacting ARTCC. We also are going to be filing a High Altitude Balloon Notice (HiBal). This is all pretty boring stuff, but it’s part of our regulatory requirements. You can read more about the process here. It also requires us to do some VOR planning, using SkyVector. Which means staring at maps like these:
Under Pressure (literally)
With our launch date right around the corner, the team and I have been focusing on testing the HASSP hardware and software. You might recall we had some issues with our altimeter. We assumed it was a problem with code, or worse, a problem with our BMP280 sensor. Turns out, it might not be either. To understand why, we need a quick science lesson about atmospheric pressure.
The BMP280 isn’t an altimeter, exactly. It’s a multi-sensor that incorporates a temperature AND pressure sensor. Turns out though, if you know both of those things, you CAN calculate altitude. The sensor can spit out pressure as an absolute value in kPa (kilopascals) and if you know your starting pressure and temperature, you can measure change. In fact, it’s almost constant. Check out this chart:

That’s a relative measurement of pressure in Earth’s atmosphere. It’s a constant. You can read more about how you calculate it here: https://en.wikipedia.org/wiki/Atmospheric_pressure
Going back to that chart for a moment, there’s a problem: look at the tail end of the graph, and what the pressure reads. It drops pretty low. Which makes sense: the higher you go, the less pressure there is. The problem is measuring a reading that low. Our BMP280 (and BMP180) can’t measure a reading that low. According the data sheet, we will probably bottom out at .3 kPa. Conditions can vary with temperature and humidity (the chart above shows the curve for 15 C or 59 F) but the problem remains. We’ll hit a height where we just can’t read a pressure and thus calculate an altitude.
So we need a backup. That’s why I decided to do what I probably should have done in the first place and that’s install a GPS module on our circuit. This module (an Adafruit Ultimate GPS Breakout) can read GPS signals from satellites and then we’ll log the data to SQL Server in a different table. This has a lot of advantages. We can measure not only location, but altitude, speed, and distance traveled. It should, if everything works right, give us a very accurate flight path when we recover it. The downside is (and part of the reason I didn’t do it in the first place) was to save a little money. This is by far the most expensive sensor we’re using in the set up. These typically run between $40 – $60 which might not seem like much until you realize how over-budget I am. That’s a story for another blog post, though, when we get done with the flight.
We’re going to leave the pressure and temperature sensors as-is though. If they can report back pressures up to a certain altitude, great. Plus it’s more data for SQL Server.
What does success look like?
I can’t lie to you: I’ve been in flop-sweat mode for the past week. Ever since we moved the launch date we’ve been working really hard at getting things ready for launch. The past few days have been especially tough: I can’t help but want this project to succeed. A lot of people have picked up on the project and buzz we’ve created, and I’ll feel like even more of a failure if this thing doesn’t go off well.
Realistically though, we’re putting a balloon 100,000 feet up in the air and none of us has ever done that before.
It’s scary! There’s so many things that can go wrong. It got me thinking: what does success look like for this project?
- Ideal: We launch the balloon, it goes up, bursts, floats back down to earth, and we are able to recover it. We open it up and query the database and see all our data. We did it!
- Less than ideal: We launch the balloon, it goes up, bursts, floats back down to earth, and we are able to recover it. We open it up and query the database and see some of our data, because we had an unexpected failure during flight. We (sort of) did it!
- Bad: We launch the balloon and never see it again.
The last one is what worries me the most. I think I can live with partial success, but I’ll have a hard time with a complete failure. Heck, I’ll settle for everything but the SQL Server failing, since the project has SQL Server in the name. The results will give us lots of data for HASSP-2, should it come to that.
If you’ve been following along in the #hassp slack channel, you might have read me panicking about recovery, and adding a backup GPS locator the payload. I’ve since decided against it, which may be a fateful decision, or not. We’re going to live and die by APRS and my ability to operate a radio. That, and the trackers themselves range from anywhere between $60 – $100, and they all require you to sign up for a monthly or yearly subscription. No thanks.
Following along and watching live
As always, you can stay tuned to this site for updates on the project, as well as my twitter feed. Also: we’re going to try live-streaming the launch on YouTube. The link to our channel is here. I’ll be making more announcements about this as the time comes. Make sure you also stop by the #hassp slack channel and say hello!
Thanks for the notes and interesting post on how things are going. The pressure chart is really fascinating to me. I haven’t looked at one before, but I live at 6400 ft, so I can see just how little pressure we have compared to sea level.
Good luck, and hope it goes well.
Thanks Steve! Yeah, it’s amazing how much science we’ve learned along the way. The pressure one caught us off guard, I think we just assumed it would have been fine. That’s why we test though!